Gravity - 9DOF sensor BMX160 + temperature and pressure sensor BMP388 - I2C- DFRobot SEN0252
- Product Code:
- 111100026


Properties
- Датчик - Температура от
- 0 °C - 70 °C
- Датчик - Температура до
- 65 °C
- Точность измерения температуры датчика
- +/- 0.5 °C
Other features
- Brand
- DFRobot
- Transducer Type
- IMU
Description
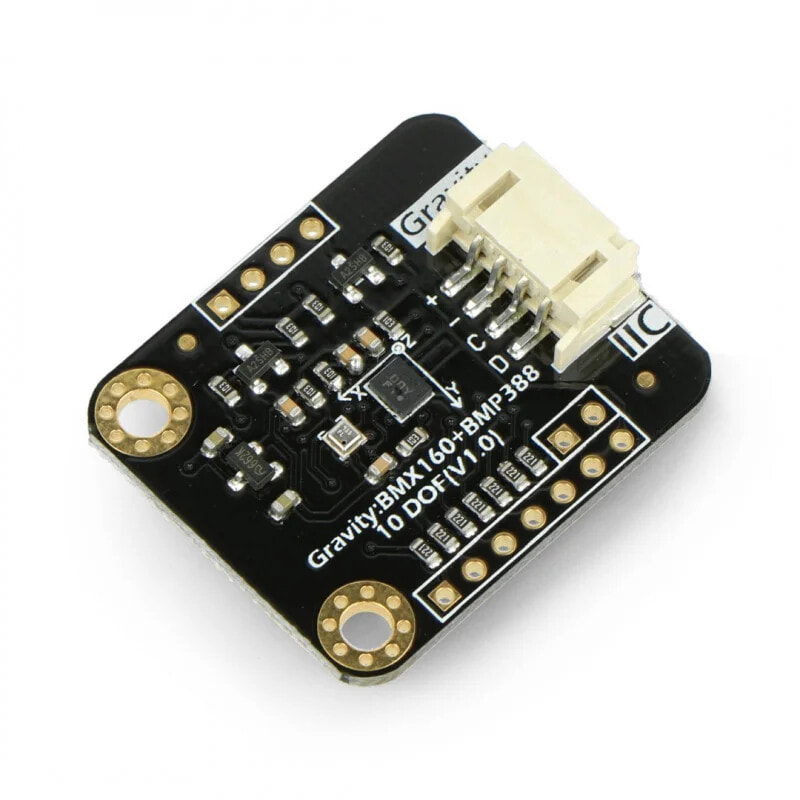
The module is equipped with two BMX160and BMP388sensors. BMX160 is a 9-axis sensor which allows to measure the acceleration in the ranges ± 2 g / ± 4 g / ± 8 g / ± 16 g and the angular position (gyroscope) in the ranges from 125°/s to 2000°, while BMP388 is responsible for measuring temperature from 0°C to 65°C and atmospheric pressure from 300 hPa to 1250 hPa.
Module with sensors BMX160 and BMP388 - Grove cable and goldpin strips are also included.
The board is equipped with a Gravity connector, which makes it possible to connect it to the base plate in an easy way. Current demand is less than 1.5 mA. The module with this combination of sensors will be used in dronesandapplications for height, position and orientation measurement.
Arduino compatible product
The manufacturer has prepared auser guide forRaspberry Pi users.
Module outputsThe module is equipped with a Gravity connector. For communication with the base board it uses the I2C interface.
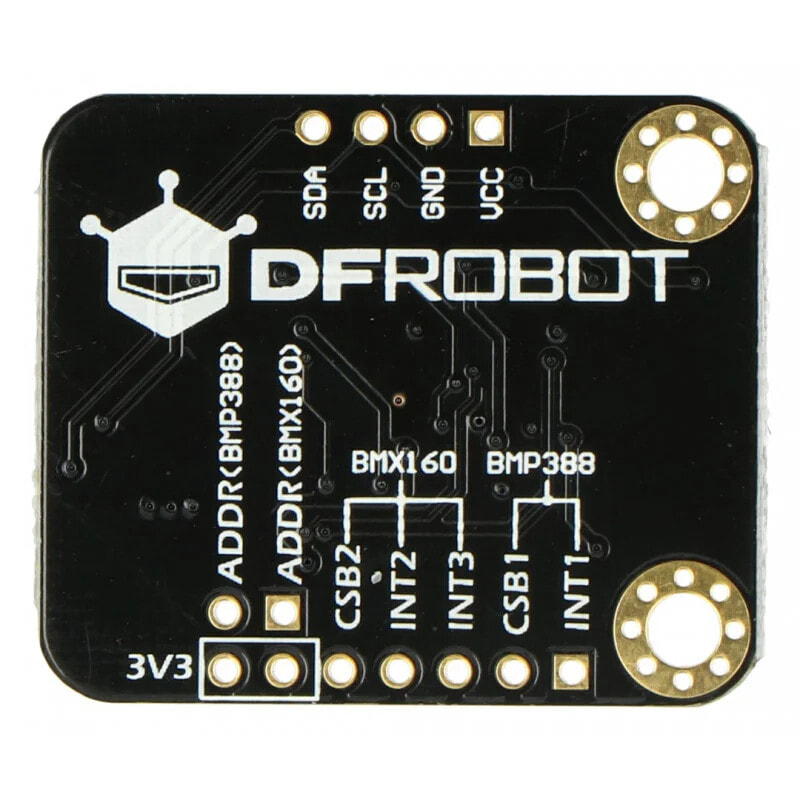
Pin Description VCC / + Supply voltage 5 V. GND / - The weight of the system. SCL / C I2C bus clock line. SDA / D I2C bus data line. 3V3 Power supply 3.3 V. ADDR(BMP388) Select I2C address for BMP388. ADDR(BMX160) Select I2C address for BMX160. CSB2 Pin selection of BMX160 protocol. INIT2 External interrupt 1 for BMX160. INIT3 External interruption 2 for BMX160. CSB1 Pin selector of BMP388 protocol. INIT1 External interruption for BMP388. Main module features- Low power consumption
- High measuring accuracy
- Small in size
- Measurement of acceleration
- Angle position measurement
- Pressure and temperature measurement
- Supply voltage 5 V or 3.3 V
- Communication: I2C
- BMX160 sensor
- accelerometer: ± 2g / ± 4 g / ± 8 g / ± 16 g
- Gyroscope: 125°/sec to 2000°/sec
- Geomagnetic sensor: ± 1150uT (x-,y axis); ± 2500 uT (z axis)
- resolution: 0.3 uT
- Sensor BMP388
- pressure: 300 hPa to 1250 hPa
- Relative pressure measurement accuracy: ± 0.08 hPa (at ± 0.66m height, 700-900hPa and 25℃-40℃)
- absolute pressure measurement accuracy: ± 0.5 hPa (at 0℃-65℃ and300-1100hPa)
- temperature: from 0°C to 65°C
- temperature measurement accuracy: ± 0.5℃
- Operating temperature: -40°C to 80°C
- Dimensions: 32 x 27 mm
- The manufacturer's website: DFRobot SEN0252
- User guide