TOF laser distance sensor -8m - UART/CAN - DFRobot SEN0337
- Product Code:
- 111100288



Properties
- Voltage To
- 3.7 V
- Voltage From
- 5.2 V
General characteristics
- Датчик - расстояние до
- 500 cm
- Датчик - расстояние от
- 1 см
Other features
- Brand
- DFRobot
- Transducer Type
- distance
Description
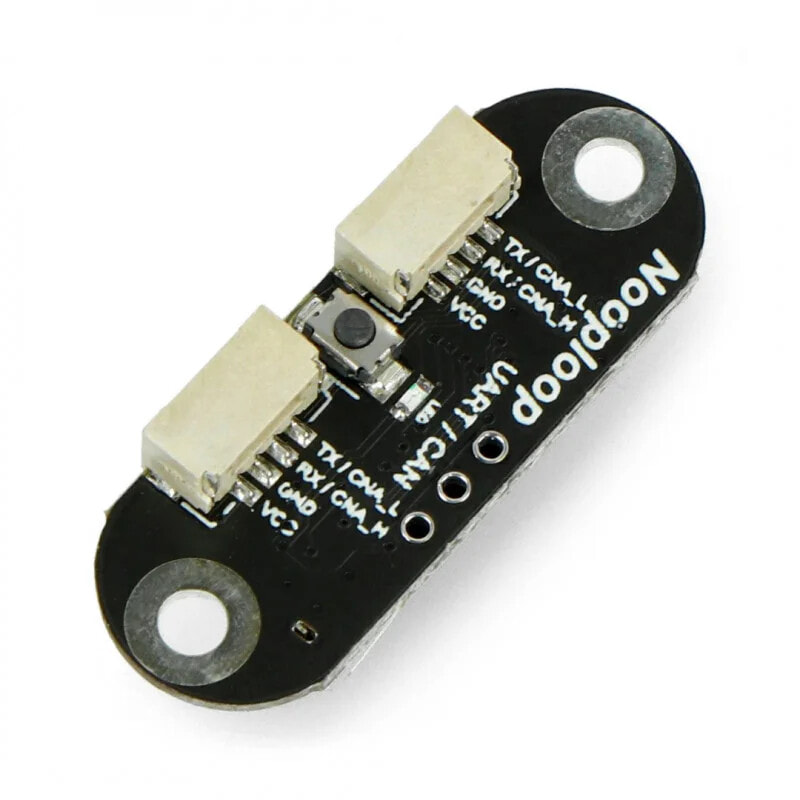
Laser sensor based on ToF(Time of Flight)measurement technology.It detects objects in the range from 0.01 m to 5 m withan accuracy of 1.5 cm. The measuring resolution is1 mm. The sensor uses a serialUART or CANinterface for communication. It is powered by5 V. The sensors can be connected in a cascade.
Contents of the TOF distance sensor kit.
The sensor's viewing angle (FoV) can be adjusted from 15° to 27°. The user has two communication interfaces to choose from: UART and CAN. These types of sensors are used in robots and drones.
The principle of the TOF sensor.
Cascade connection of TOF sensorsUnlike other distance sensors, this sensor uses two identical communication interfaces. When an ID is set for each sensor and the sensors are combined in multiple series, the sensor information can be read from one interface. TheUARTinterface supportsup to 8sensors connected in cascade, while the CAN interface supportsup to 7sensors.
Example of a sensor cascade connection.
Arduino compatible product
The manufacturer provides auser guide forArduino users.
Distance sensor leadsThe TOF distance sensor uses a serial UART or CAN interface for communication. It is powered from 3.7 V to 5.2 V.
Example of sensor connection.
Cable colour Description Black GND - mass of the system. Red VCC - supply voltage 3.3 V / 5 V. Blue Serial interface receiver / CAN bus. Green Serial interface transmitter / CAN bus. TOF distance sensor specification- The tension of work: 5 V
- Supply voltage: 3.7 V to 5.2 V
- Current consumption: 0,06 A
- Power consumption: 290 mW (active UART output, long range detection, 5 V supply)
- The interface:
- UART (two interfaces can be used as UART at the same time, 3.3 V TTL, default band frequency 921600 bps)
- CAN (two interfaces can be used as CAN at the same time, default frequency 1 Mbps)
- Maximum number of sensors connected in cascade:
- 8 for UART
- 7 for CAN
- Blind zone: 1 cm
- Measuring range:
- short range: from 0.012 m to 2.16 m
- average range: 0.012 m to 3.6 m
- long range: from 0.01 m to 5 m
- Typical accuracy:
- short range: ± 1 cm,standard deviation below 0.3 cm
- average range: ± 1cm, standard deviation below 1,5 cm
- long range: ± 1,5 cm, standard deviation less than 0,5 cm at 0,013 m and less than 8 cm at 3,5 m
- The length of the emitted wavelength: 940 nm
- Viewing angle (FoV): adjustable from 15° to 27°
- Dimensions: 35.58 x 12 x 80.5 mm
- Weight: 2,7 g
Sensor dimensions.
Useful links- The manufacturer's website: DFRobot SEN0337
- The wiki site